
Easy operation 、 high cost performance、fully automatic aerial photogrammetric controller

Panda II was developed specifically for those UAV which are used for aerial photogrammetric. It using inertial strapdown attitude calculations combined with Kalman digital filter fusion algorithms to give UAVs higher reliability and flight stability. It can be used with the RTK system to achieve centimeter-level positioning accuracy, making it ideal for small size fixed-wing UAV.

Small size
intelligent control
powerful function
stable and reliable
High precision
simple operation





-

High cost
-

automatic
-

simple
-

stable
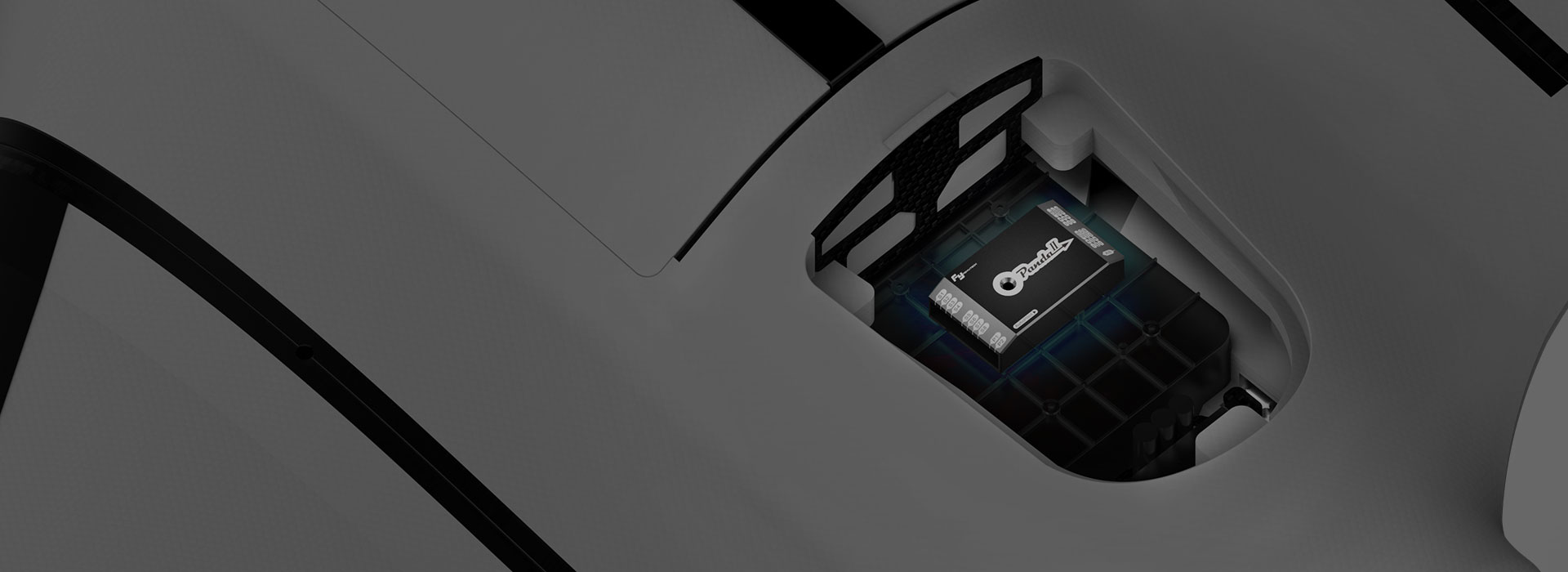
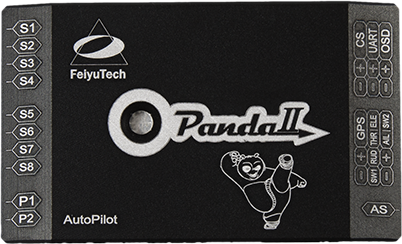
Physical characteristics
The shell of the autopilot uses the aluminum alloy integrated electromagnetic shielding design, effectively shielding external interference. Work with fy-608 data radio, the communication distance can reach as far as 30km. The autopilot integrates gyroscope and accelerometer which can reduce redundant interfaces and ease installation of wiring, greatly improving the user's operation efficiency. In addition, the autopilot has the advantage of small size and light weight, which can be applied to different types of UAV equipment.

Navigation flight
PandaII can set up 98 waypoints once and record POS data in real time. During flight, it supports turning without taking photos, which can easily meet the aerial survey requirements of small electric fixed-wing UAV.
PandaII uses high-performance SINS/GPS algorithm with built-in a high-precision IMU, which can accurately and quickly adjust the flight attitude. Combined with the new internal shock absorbing structure, the operation is simpler and the stability is stronger and more reliable.

Failsafe function
Multiple safety protection mechanisms are built in for autopilot, which can automatically make judgment based on the environment and choose whether to implement safety protection mechanisms.

Emergency open parachute
no GPS circling
automatic return no signal
electronic fence

Control Methods
PandaII supports various of flight control methods, such as Manual mode, Stabilize and Auto. During the flight, user can switch mode freely to meet the requirements of different environments.
Taking-off and landing
PandaII supports a variety of ways which automatic take-off and landing, the user can choose throwing off or catapult launch according to condition, and choose to parachute or slide landing according to the surrounding environment.


Photograph
PandaII supports three kinds of photographing methods: Take photos by time interval, Take photos by distance interval and manual. During the flight, it can freely change the photographing mode according to different environments.
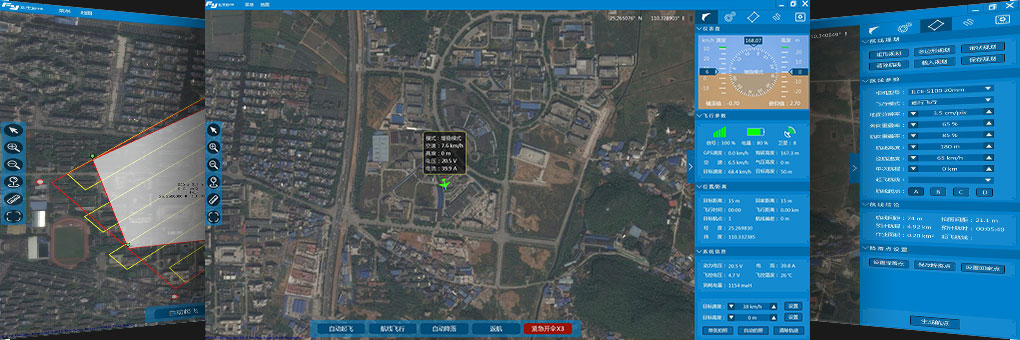
FY-GCS
The new version of GCS is simple to operate, the flight data information will be saved in the computer, which the users could use it to analyze the flight, it is convenient to use, improves the aerial survey operation efficiency. Multiple planning (the software supports three planning modes: rectangle planning, polygon planning and belt planning, to meet the requirements of various aerial survey); Real-time monitoring, ground station can monitor flight data information, users can monitor flight attitude in real time; Control mode (Ground station software is built in a variety of route planning methods, such as: pointing flight, circling in place, route circulation etc. )

